11267076_988567247860146_1342161463_o

11725426_982998211750383_1008896058_o

11743611_982998205083717_1640506239_o
11768796_988567244526813_708791816_o
11783542_988567251193479_1280966567_o
12171329_1036907733026097_2044078409_o

12171903_1036908469692690_819663218_o
 - Adobe Reader_t.jpg)
2015-10-12 22_34_22-Master_Thesis_Joao_OBarros.pdf (PROTEGIDO) - Adobe Reader

222

30x30_Aluminium_Profile

333

Evaluationtool

Filters
Force

GHOSTmaneuvers

Geomagic_Touch

HIW_final

HYM1

HYM2
IK_solve

IK_solve2

IK_solve3

IK_trials
Imagem1
NewLayout

Omni_kine
Open_app

Open_dia

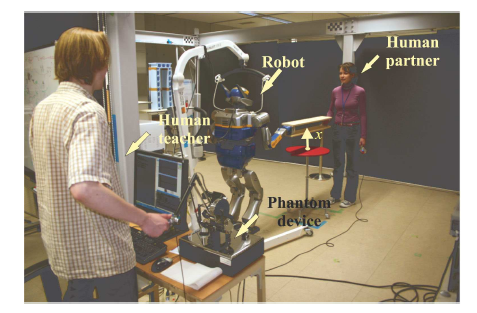
PHUA_real
PHUAwithGHOST

Phantom_h
Phantom_v

Phantom_v2
Phua_DOFS

ROSint

Sensibility
Torque_trials

Trials
UTI_ave

Vrep_lib

archiver

b

bimanual

brackets

bruno_best_hip_xz1

bruno_best_knee_xy

bruno_best_knee_xz1

bruno_best_lean_xz

bruno_best_lean_xz1
bruno_hip
bruno_hip2

bruno_hip_pitch

bruno_hip_pitch2

bruno_hip_roll

bruno_hip_roll2

bruno_joint_position

bruno_joint_position2
bruno_knee
bruno_knee2

bruno_knee_roll
bruno_knee_roll2

cali_haptic

feed_blocks

feed_main

feet_window

filer
filters_block

flexoes
forcefeed

fullGHOST

fullUIs

full_feed

fullinterface

ghost_arm

guias
haptic_rendering

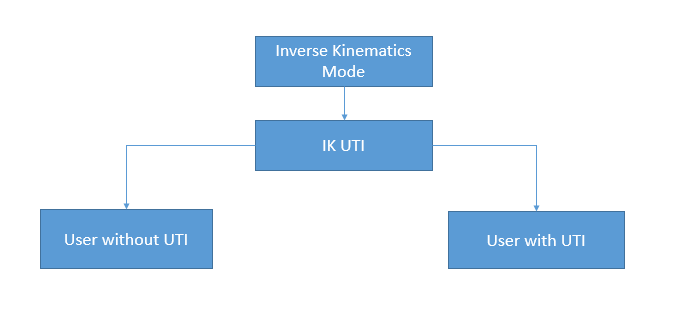
ik_mode

ivan_best_hip_xz1

ivan_best_knee_xz

ivan_best_knee_xz1

ivan_best_lean_xz

ivan_best_lean_xz1
ivan_hip

ivan_hip2

ivan_joint_position

ivan_joint_position2
ivan_knee

ivan_knee2
knee_flexion
lean_phua

left_Ghost

main_loop

marcelo_best_hip_xz1

marcelo_best_knee_xz

marcelo_best_knee_xz1

marcelo_best_lean_xz

marcelo_best_lean_xz1

marcelo_hip

marcelo_hip2
marcelo_hip_pitch
marcelo_hip_pitch2

marcelo_hip_roll
marcelo_hip_roll2

marcelo_joint_position

marcelo_joint_position2
marcelo_knee
marcelo_knee2
marcelo_knee_roll

marcelo_knee_roll2

meh

meh3

meh6

no_visual
omni_angulos

paulo_best_hip_xz1

paulo_best_knee_xz

paulo_best_knee_xz1

paulo_best_lean_xz

paulo_best_lean_xz1

paulo_hip
paulo_hip2
paulo_hip_pitch

paulo_hip_pitch2
paulo_hip_roll
paulo_hip_roll2

paulo_joint_position

paulo_joint_position2
paulo_knee
paulo_knee2

paulo_knee_roll
paulo_knee_roll2

phantom_geo

phantom_main

phua_set
phua_swing
phua_swing2

phua_up

platform

punctual
quartau_hip

quartau_hip2

quartau_knee

quartau_knee2
relevancia_torque

right_Ghost

robot_state

robots

robots2
ros_nodes1

router_con

servo_loop

slabs

standard_pos
stylus

stylus1
stylus2
subsystems_of_haptic

suporte

support1
teleopration_mobile

torque_UTI

torque_filter
torque_gen

up_chain

vertical_pos
vrep_phua
weee
 11267076_988567247860146_1342161463_o
11267076_988567247860146_1342161463_o
 11725426_982998211750383_1008896058_o
11725426_982998211750383_1008896058_o
 11743611_982998205083717_1640506239_o
11743611_982998205083717_1640506239_o
 11768796_988567244526813_708791816_o
11768796_988567244526813_708791816_o
 11783542_988567251193479_1280966567_o
11783542_988567251193479_1280966567_o
 12171329_1036907733026097_2044078409_o
12171329_1036907733026097_2044078409_o
 12171903_1036908469692690_819663218_o
12171903_1036908469692690_819663218_o
 - Adobe Reader.png) 2015-10-12 22_34_22-Master_Thesis_Joao_OBarros.pdf (PROTEGIDO) - Adobe Reader
2015-10-12 22_34_22-Master_Thesis_Joao_OBarros.pdf (PROTEGIDO) - Adobe Reader
 222
222
 30x30_Aluminium_Profile
30x30_Aluminium_Profile
 333
333
 Evaluationtool
Evaluationtool
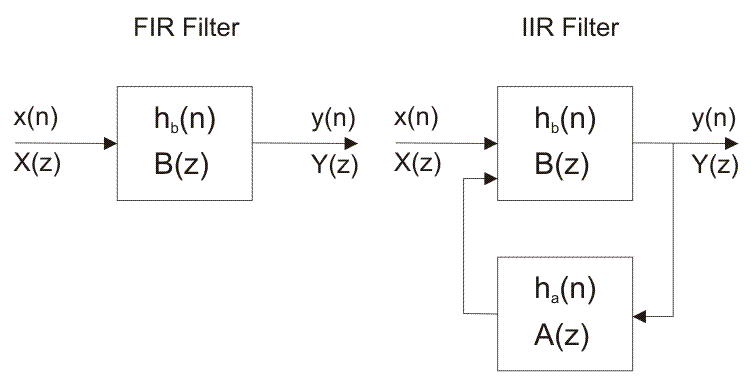
 Filters
Filters
 Force
Force
 GHOSTmaneuvers
GHOSTmaneuvers
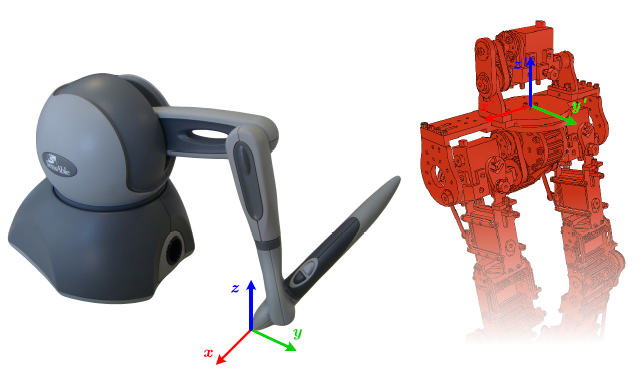
 Geomagic_Touch
Geomagic_Touch
 HIW_final
HIW_final
 HYM1
HYM1
 HYM2
HYM2
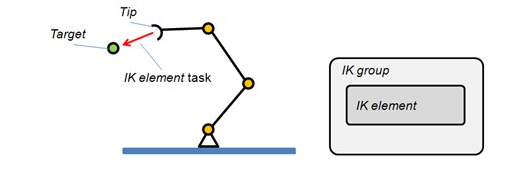 IK_solve
IK_solve
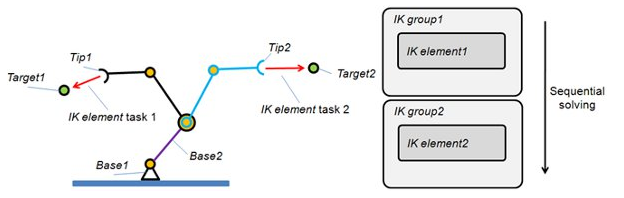 IK_solve2
IK_solve2
 IK_solve3
IK_solve3
 IK_trials
IK_trials
 Imagem1
Imagem1
 NewLayout
NewLayout
 Omni_kine
Omni_kine
 Open_app
Open_app
 Open_dia
Open_dia
 PHUA_real
PHUA_real
 PHUAwithGHOST
PHUAwithGHOST
 Phantom_h
Phantom_h
 Phantom_v
Phantom_v
 Phantom_v2
Phantom_v2
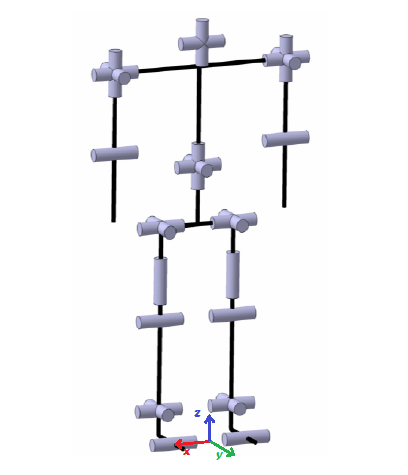 Phua_DOFS
Phua_DOFS
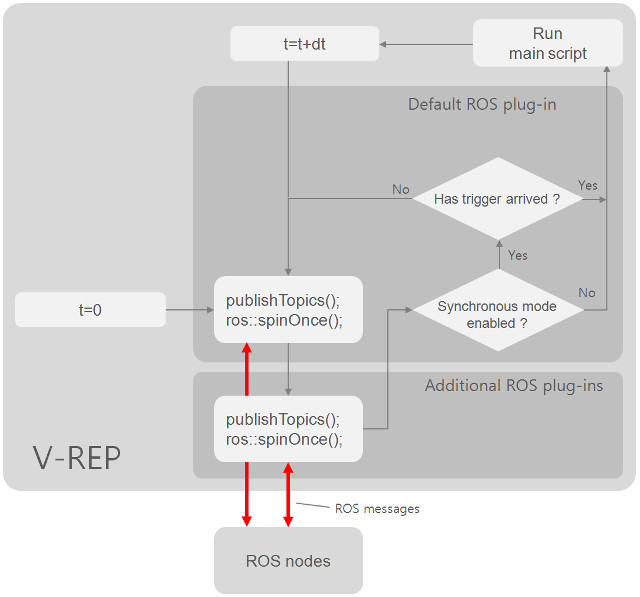 ROSint
ROSint
 Sensibility
Sensibility
 Torque_trials
Torque_trials
 Trials
Trials
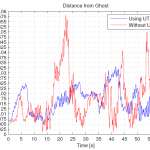
 UTI_ave
UTI_ave
 Vrep_lib
Vrep_lib
 archiver
archiver
 b
b
 bimanual
bimanual
 brackets
brackets
 bruno_best_hip_xz1
bruno_best_hip_xz1
 bruno_best_knee_xy
bruno_best_knee_xy
 bruno_best_knee_xz1
bruno_best_knee_xz1
 bruno_best_lean_xz
bruno_best_lean_xz
 bruno_best_lean_xz1
bruno_best_lean_xz1
 bruno_hip
bruno_hip
 bruno_hip2
bruno_hip2
 bruno_hip_pitch
bruno_hip_pitch
 bruno_hip_pitch2
bruno_hip_pitch2
 bruno_hip_roll
bruno_hip_roll
 bruno_hip_roll2
bruno_hip_roll2
 bruno_joint_position
bruno_joint_position
 bruno_joint_position2
bruno_joint_position2
 bruno_knee
bruno_knee
 bruno_knee2
bruno_knee2
 bruno_knee_roll
bruno_knee_roll
 bruno_knee_roll2
bruno_knee_roll2
 cali_haptic
cali_haptic
 feed_blocks
feed_blocks
 feed_main
feed_main
 feet_window
feet_window
 filer
filer
 filters_block
filters_block
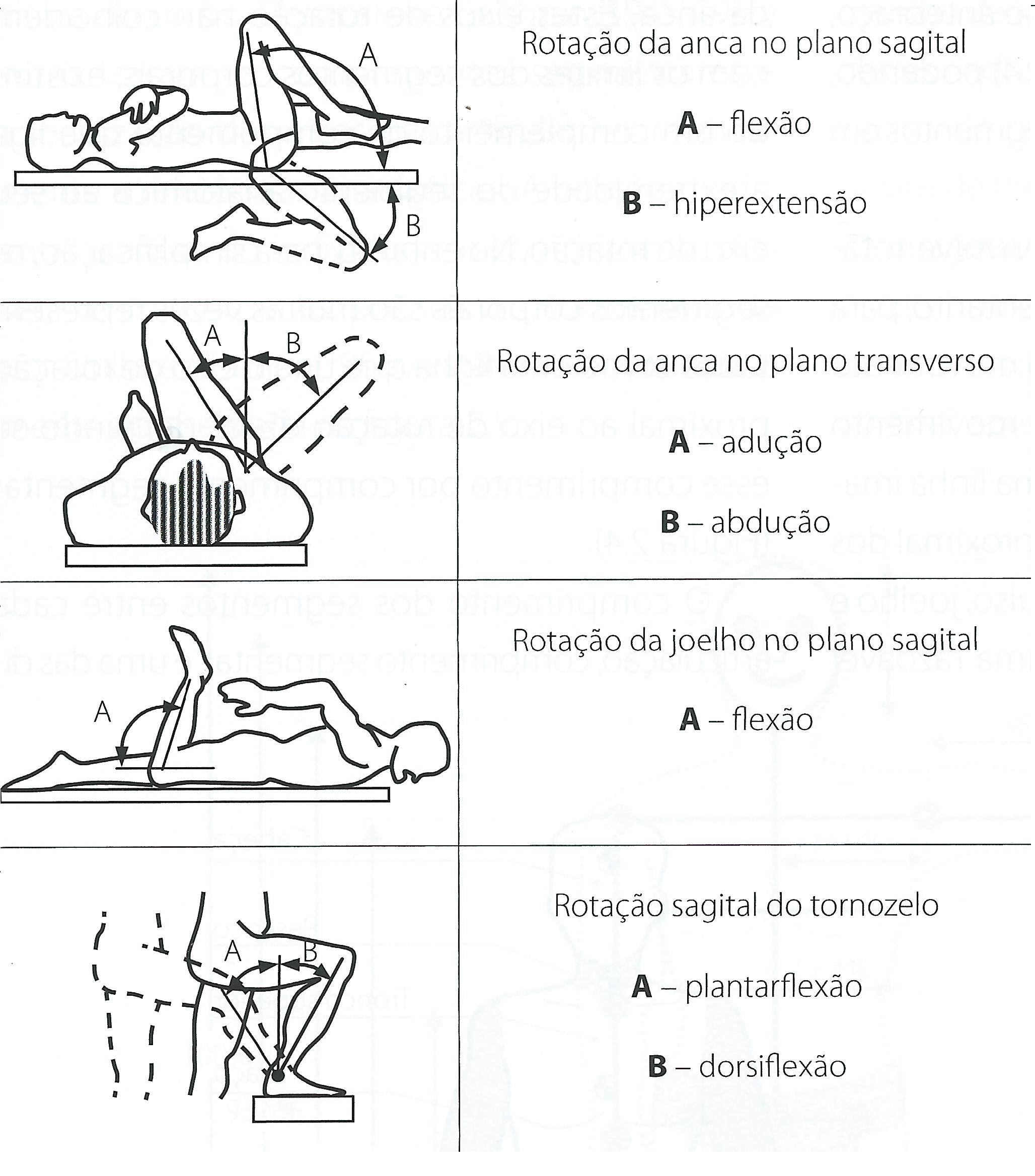 flexoes
flexoes
 forcefeed
forcefeed
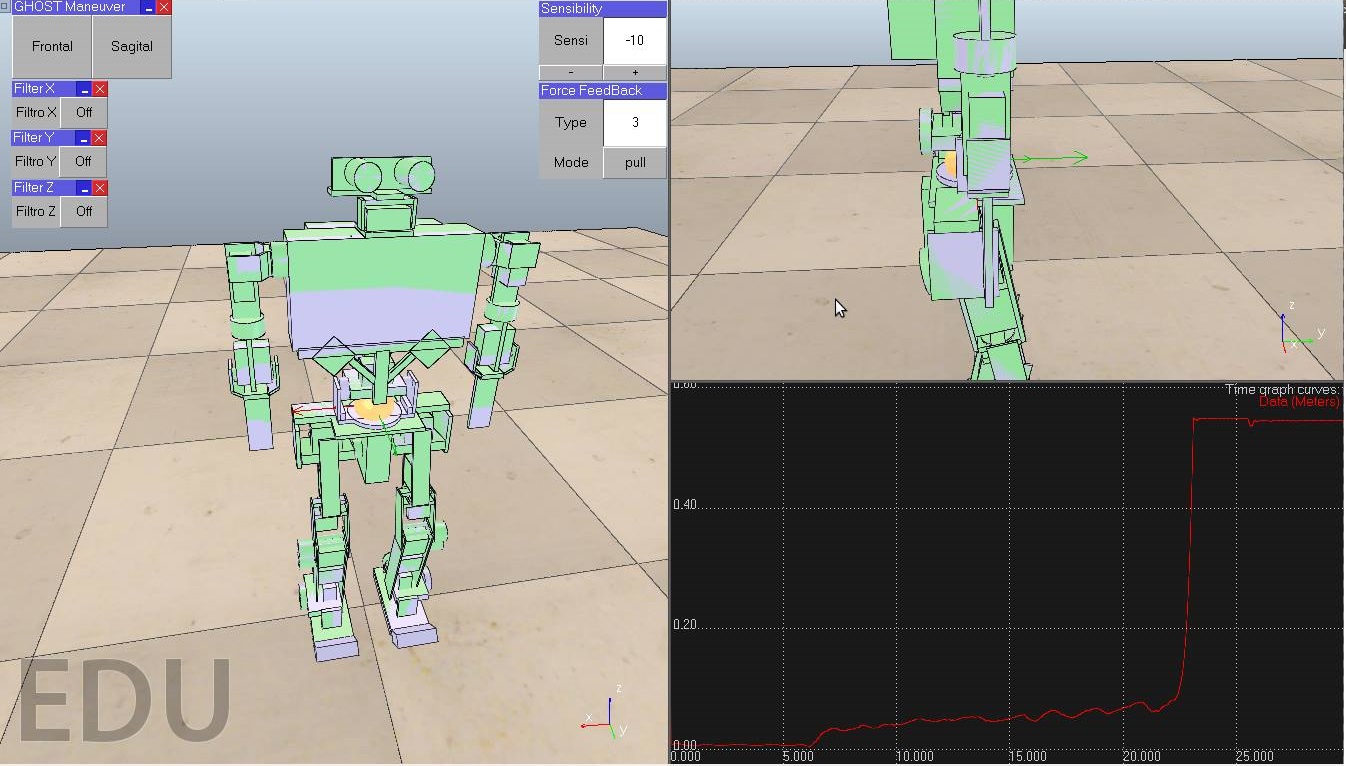
 fullGHOST
fullGHOST
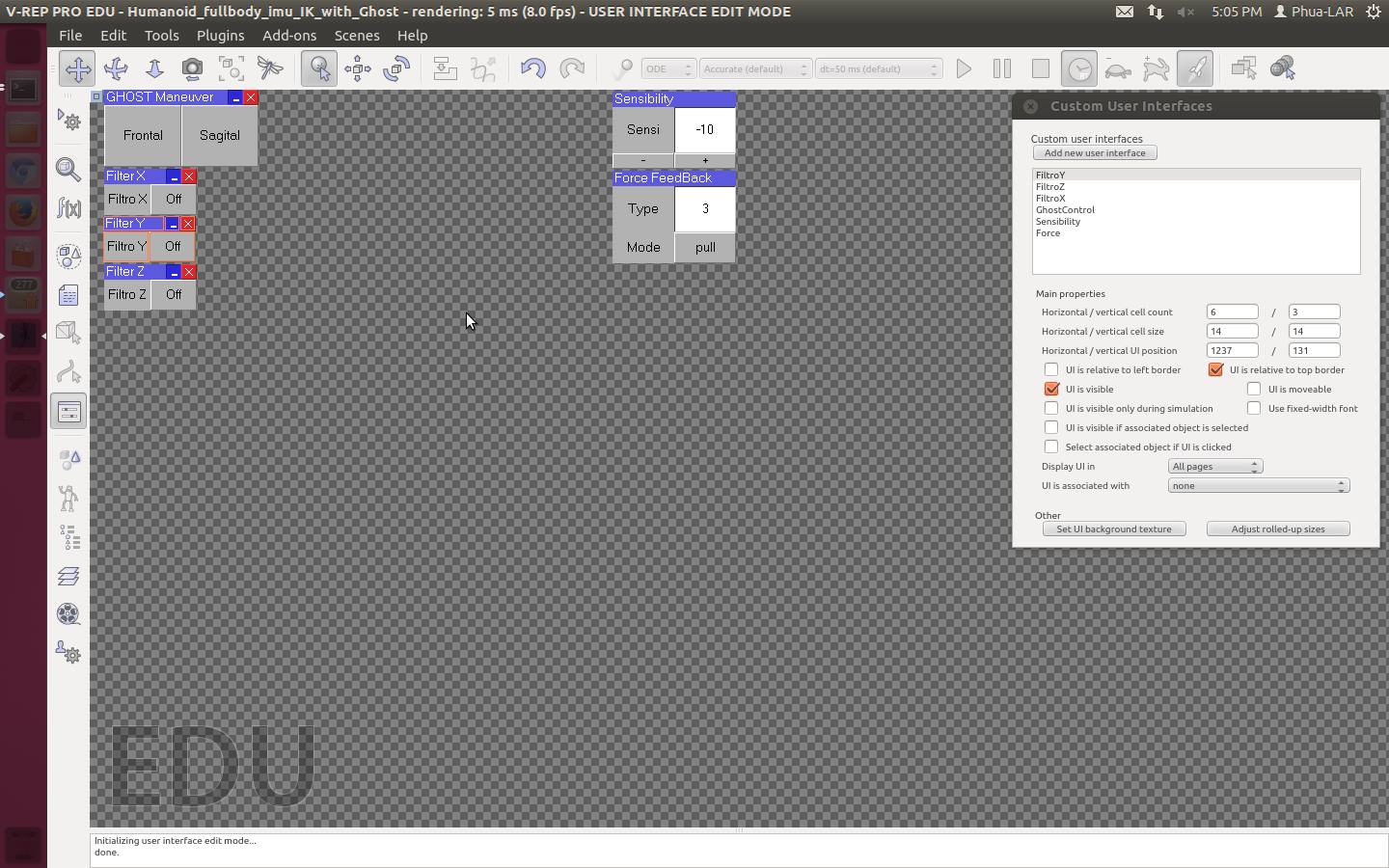 fullUIs
fullUIs
 full_feed
full_feed
 fullinterface
fullinterface
 ghost_arm
ghost_arm
 guias
guias
 haptic_rendering
haptic_rendering
 ik_mode
ik_mode
 ivan_best_hip_xz1
ivan_best_hip_xz1
 ivan_best_knee_xz
ivan_best_knee_xz
 ivan_best_knee_xz1
ivan_best_knee_xz1
 ivan_best_lean_xz
ivan_best_lean_xz
 ivan_best_lean_xz1
ivan_best_lean_xz1
 ivan_hip
ivan_hip
 ivan_hip2
ivan_hip2
 ivan_joint_position
ivan_joint_position
 ivan_joint_position2
ivan_joint_position2
 ivan_knee
ivan_knee
 ivan_knee2
ivan_knee2
 knee_flexion
knee_flexion
 lean_phua
lean_phua
 left_Ghost
left_Ghost
 main_loop
main_loop
 marcelo_best_hip_xz1
marcelo_best_hip_xz1
 marcelo_best_knee_xz
marcelo_best_knee_xz
 marcelo_best_knee_xz1
marcelo_best_knee_xz1
 marcelo_best_lean_xz
marcelo_best_lean_xz
 marcelo_best_lean_xz1
marcelo_best_lean_xz1
 marcelo_hip
marcelo_hip
 marcelo_hip2
marcelo_hip2
 marcelo_hip_pitch
marcelo_hip_pitch
 marcelo_hip_pitch2
marcelo_hip_pitch2
 marcelo_hip_roll
marcelo_hip_roll
 marcelo_hip_roll2
marcelo_hip_roll2
 marcelo_joint_position
marcelo_joint_position
 marcelo_joint_position2
marcelo_joint_position2
 marcelo_knee
marcelo_knee
 marcelo_knee2
marcelo_knee2
 marcelo_knee_roll
marcelo_knee_roll
 marcelo_knee_roll2
marcelo_knee_roll2
 meh
meh
 meh3
meh3
 meh6
meh6
 no_visual
no_visual
 omni_angulos
omni_angulos
 paulo_best_hip_xz1
paulo_best_hip_xz1
 paulo_best_knee_xz
paulo_best_knee_xz
 paulo_best_knee_xz1
paulo_best_knee_xz1
 paulo_best_lean_xz
paulo_best_lean_xz
 paulo_best_lean_xz1
paulo_best_lean_xz1
 paulo_hip
paulo_hip
 paulo_hip2
paulo_hip2
 paulo_hip_pitch
paulo_hip_pitch
 paulo_hip_pitch2
paulo_hip_pitch2
 paulo_hip_roll
paulo_hip_roll
 paulo_hip_roll2
paulo_hip_roll2
 paulo_joint_position
paulo_joint_position
 paulo_joint_position2
paulo_joint_position2
 paulo_knee
paulo_knee
 paulo_knee2
paulo_knee2
 paulo_knee_roll
paulo_knee_roll
 paulo_knee_roll2
paulo_knee_roll2
 phantom_geo
phantom_geo
 phantom_main
phantom_main
 phua_set
phua_set
 phua_swing
phua_swing
 phua_swing2
phua_swing2
 phua_up
phua_up
 platform
platform
 punctual
punctual
 quartau_hip
quartau_hip
 quartau_hip2
quartau_hip2
 quartau_knee
quartau_knee
 quartau_knee2
quartau_knee2
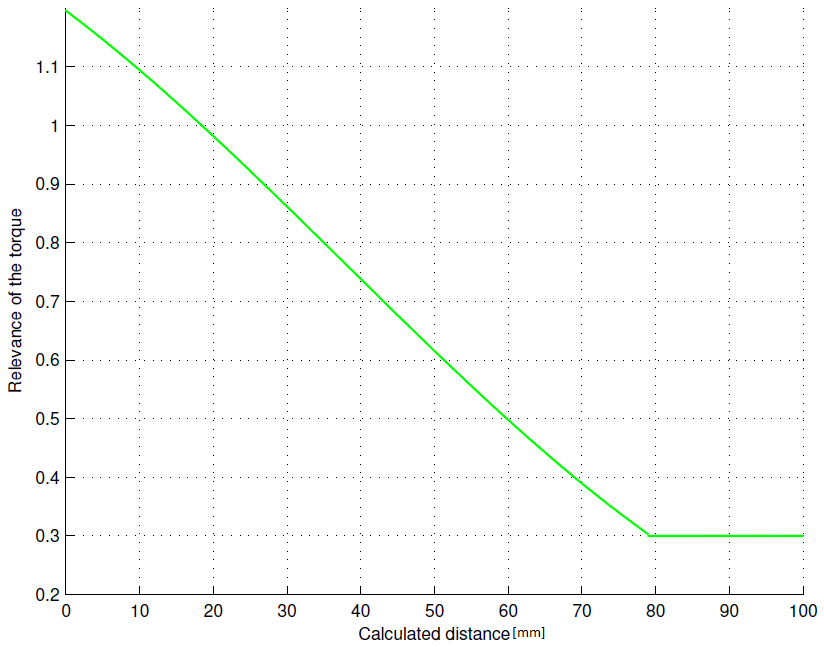 relevancia_torque
relevancia_torque
 right_Ghost
right_Ghost
 robot_state
robot_state
 robots
robots
 robots2
robots2
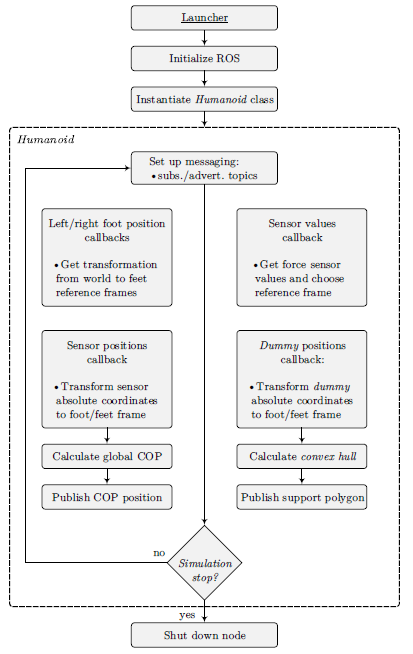
 ros_nodes1
ros_nodes1
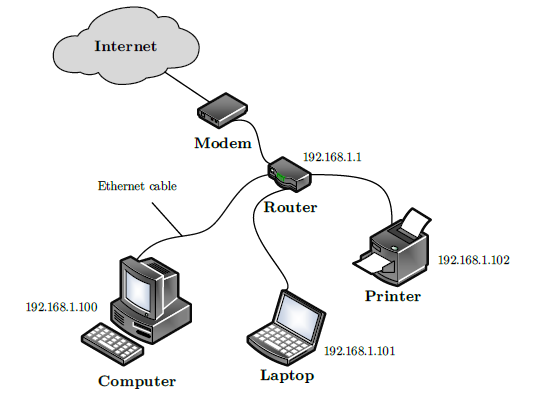 router_con
router_con
 servo_loop
servo_loop
 slabs
slabs
 standard_pos
standard_pos
 stylus
stylus
 stylus1
stylus1
 stylus2
stylus2
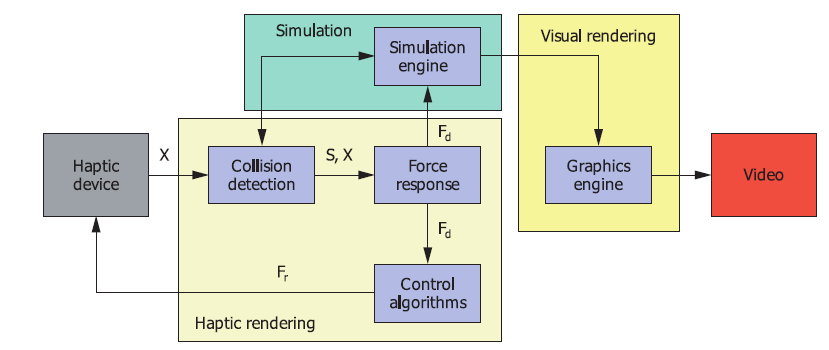
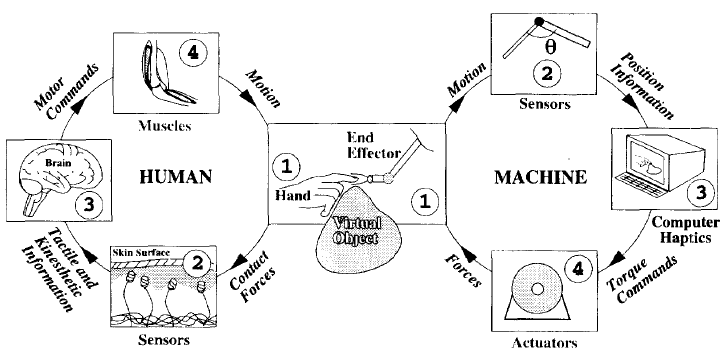 subsystems_of_haptic
subsystems_of_haptic
 suporte
suporte
 support1
support1
 teleopration_mobile
teleopration_mobile
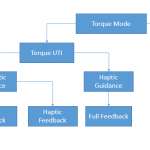
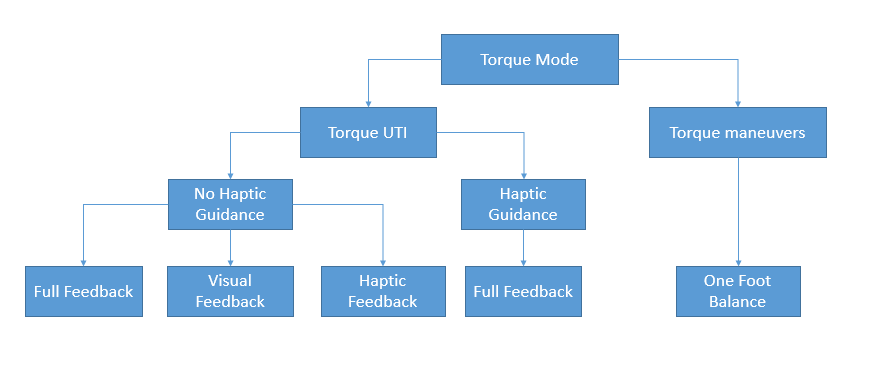
 torque_UTI
torque_UTI
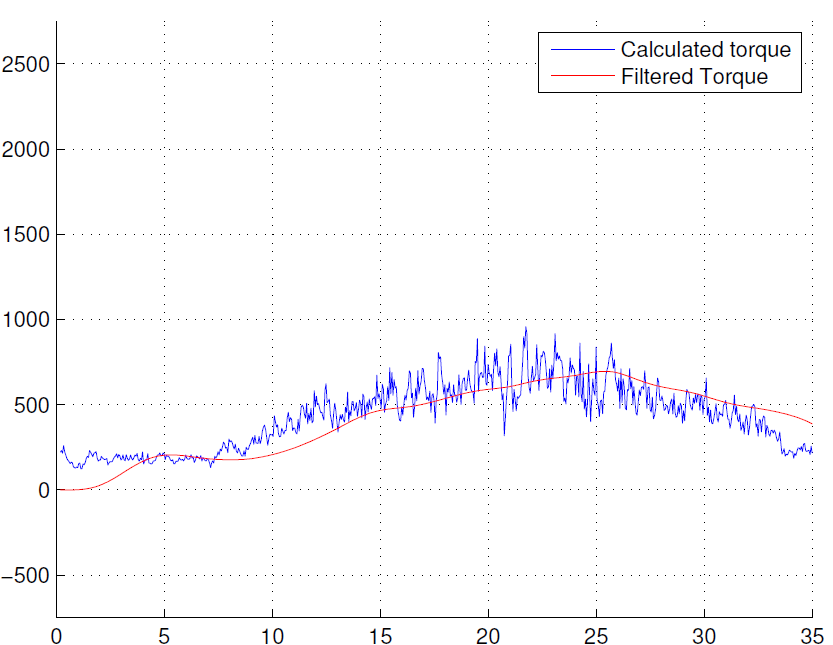 torque_filter
torque_filter
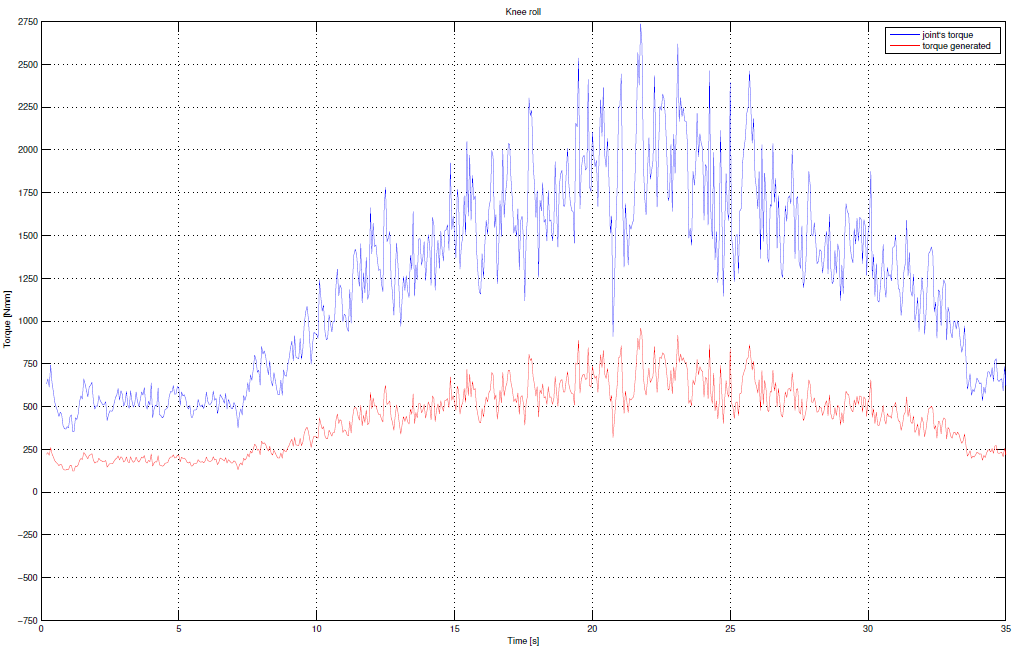 torque_gen
torque_gen
 up_chain
up_chain
 vertical_pos
vertical_pos
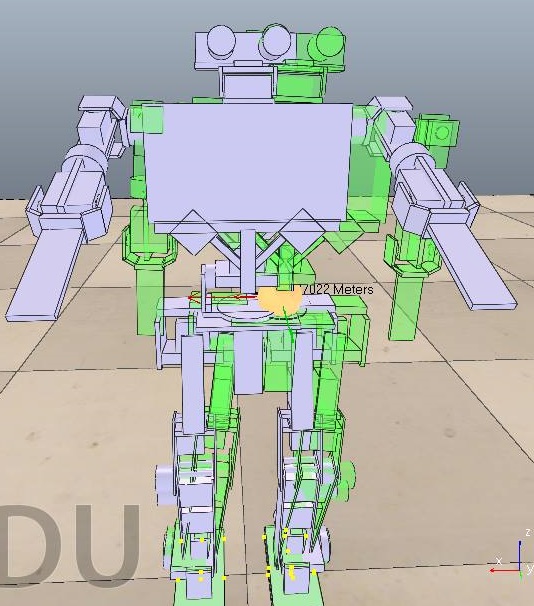
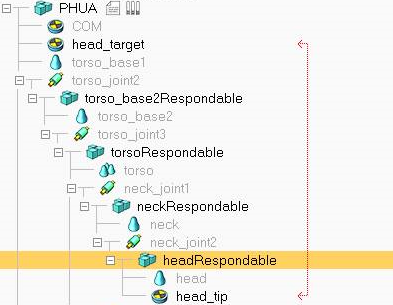
 vrep_phua
vrep_phua
 weee
weee